
+91 6002993949
submission@iarconsortium.org
Open Access
ISSN (Print) : 2788-9394
ISSN (Online) : 2788-9408
This study proposes a decentralized coordination framework for autonomous drones by integrating Multi-Agent Systems (MAS) with Swarm Intelligence (SI). Using simple local behavioral rules—separation, alignment, and cohesion—drones operate collaboratively to achieve shared objectives without central control. Through a series of simulated scenarios, the model demonstrated strong performance across key tasks. In the collision avoidance test, the system reduced collision incidents from 30 to zero within 10 seconds in high-density swarms. During goal convergence, over 80% of drones reached the target within an average of 12–18 seconds, depending on swarm size. For spatial distribution, the swarm achieved up to 96% area coverage with minimal inter-agent spacing. Even under stress tests like GPS drift, agent loss, and communication failures, the swarm recovered in less than 7 seconds. These results confirm the scalability, fault tolerance, and adaptability of the model, making it suitable for real-world applications such as search and rescue, environmental monitoring, and precision agriculture.
The expedited progress of the capabilities of drone-operated flying vehicles now commonly referred to as drones has forever transformed the functioning of many industries including agriculture, delivery, natural disasters control, air quality measurements, and other areas. Through their ability to reach distant areas, perform independent operations and provide in real-time, drones have proven to be quite invaluable in the civilian and military applications. Therefore, the safe and smart as well as efficient use of drones that coordinate sequentially or as part of fleets poses an even more complex academic and practical problem [1].
The centralized control architecture became the dominant pattern of pilotless airplanes management within a period of 10-15 years; such a paradigm implies, that there exists one central control unit which commands all the vehicles based on the overall perspective. This architecture is good in environments that are stable or are well-managed but this approach fails when there is need of agility, timeliness and strength in the system demanded by the mission. The centralized systems are affected by scalability issues, latency and, above all, single-point failure: should communication channels fail or the central node drop off, the rest of the fleet may fall down as a cascade.
Due to such weaknesses, scientists are starting to question decentralized models which are based on ideas which can be seen in nature. Take flocks of birds or fish, or colonies of ants: every member obeys only a handful of local rules, such as maintain alignment with a neighbor, avoid collision, stay in proximity, are typical instruction: and the rules operating together produce amazingly versatile and robust behavior. This is a strategy, which is called the swarm intelligence and it now finds its way being applied in the concerted effort to control autonomous drones [2].
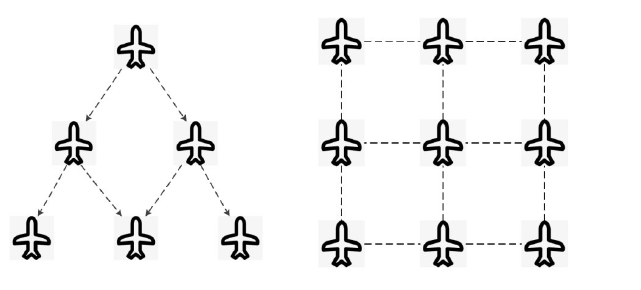
Figure 1: Structural models for autonomous drone coordination using graph-based and grid-based formations
Through the combination of the swarm intelligence and the multi-agent systems (MAS) techniques, it is possible to create drone systems where each of the aircraft becomes an autonomous agent with only a small amount of local information, as well as simple behavior, and still being aligned to a single global goal. The current study evaluates the effectiveness of this integration with the focus on how the drone autonomously operating can prevent the collision, react to the conditions of the environment, and engage in the tasks of the missions without the centralized control [3].
The end-goal is a hierarchical idea concept of autonomous drone coordination on top of MAS and swarm intelligence. Accordingly, key variables, i.e., relative positioning, direction of heading, and constraints on movement will be examined to identify the impact that each of these factors will have on collective performance. To test the proposed model scenarios that imitate the real-world constraints and requirements of coordination of these will be created.
Therefore, the research represents a step forward in the field of distributed artificial intelligence and autonomous robotics providing fault-tolerant and saleable leads to centralized drone coordination. Scenarios where this can be applied practically include large scale search and rescue, the planning of supply lines over rough terrain and dynamic environmental monitoring, when having a centralized entity may not be possible or even sufficient.
Multi-Agent Systems in Robotics
In robotics, there is multi-agent systems (MAS) to allow the collaboration between autonomous agents without involving any central authority. In a genuinely decentralized system, in the absence of top-level instructions, each and every robot acts based on what it sees locally and communicates with others, thus facilitating self-organization and emergence of collective behavior. The bottom-up approach stands out in contrast with centralized control, where one individual agent has the responsibility of organizing the whole group. The benefit of the decentralized architecture is the demonstrable robustness and scalability. It has been demonstrated experimentally that even the minimum form of purely local, peer-to-peer interaction (the presence of indirect communication channels, which can include staggery), can be sufficient to provide reliable and scalable cooperation [4]. Decentralized MAS have this property: since no part is essential, a decentralized system can continue even in the failure of individual agents, and their local interaction norms make it easy to expand them to large groups. In addition, nature-inspired paradigms show how simple local rules, local interaction rules, can give globally-reliable results, area covering or maintenance, without any global controller.
However, the real world has challenges to the traditional design of MAS. When there are a lot of agents active or the environment is dynamic, it becomes complex to hold the team behavior consistent with merely local autonomy. Issues associable to scalability and adaptability arise [5,6] A number of solutions have been explored by the researchers aimed to alleviate such complications, including the use of market-based task assignment, consensus mechanisms, and behavior-based control. More recently, methods based on learning have emerged as more popular: in reinforcement learning the agents are able to find optimal distributed policies, whereas the game theory provides constructive settings the agents can use to negotiate and develop cooperative policies. Of equal significance is the fact that the use of swarm intelligence concepts makes MAS far more appealing to work with due to properties that help build emergent group behavior. Swarm algorithms have the advantage of giving agents higher flexibility and hardiness, and may thereby find themselves in a position to spontaneously create self-organization and coordinate themselves without being programmed into every situation. Overall MAS in robotics provide a paradigm of autonomous problem-solving by decentralized communication and control and many studies are actively being carried on to enhance their scale-ability, versatility and performance in handling intricate tasks.
Principles of Swarm Intelligence
Swarm intelligence (SI) is a branch of artificial intelligence inspired by the collective behavior of natural systems such as bird flocks, fish schools, and insect colonies [7]. In these systems, numerous simple agents interact through local rules, giving rise to complex and adaptive group behavior without the presence of a central controller. A seminal contribution in this domain is Reynolds' Boids model, which introduced three fundamental rules—separation, alignment, and cohesion—that guide each agent’s movement based on the behavior of nearby agents. When applied in robotic systems, these simple rules enable agents to form stable formations, avoid collisions, and maintain coordinated motion with emergent group behavior [8].
Beyond flocking behavior, SI draws heavily on social insects. For example, ants use pheromone-based communication to discover and reinforce optimal paths to resources, inspiring the development of Ant Colony Optimization (ACO) algorithms. In ACO, agents leave virtual pheromones on paths in a search space, enabling collective discovery of efficient solutions [9].
Similarly, behaviors seen in bees (such as the waggle dance) and termites (stigmergic construction) have been modeled to achieve decentralized decision-making and collaboration in artificial systems [10].
A unifying principle in swarm intelligence is that agents operate under simple rules with limited perception, yet the system as a whole can solve complex problems through self-organization. This architecture provides robustness—since the failure of individual agents does not compromise system performance—as well as scalability and adaptability to dynamic environments [11]. These properties make SI highly attractive for robotic applications such as exploration, network formation, distributed sensing, and optimization tasks [9]. In essence, swarm intelligence provides a biologically grounded framework for building multi-agent systems capable of coordinated, resilient, and intelligent behaviors through purely local interactions.
Applications in Drone Systems
The new intersection of multi-agent systems and swarm intelligence marked the dawn of the coordinated usage of drone-based operations on a continuum of applied domains. In those distributed structures, the unmanned air vehicles communicate, distribute work, and re-schedule on the ground--otherwise inaccessible combinations of ability that, overall, grant higher effectiveness and toughness than single-agent networks [12].
Take an example of Search and Rescue (SAR). Upon the very first moments of a natural disaster, a swarm could make a rapid reconnaissance, identify the survivors, and send real-time situational updates to the responders on the ground. Due to the intrinsically decentralized nature of the behavior, the swarm is able to simultaneously cover large damaged fields and simultaneously do away with centralized monitoring, hence ensuring an improved speed as well as accuracy [13].
A similar benefit can be noted in parallel use in areas of security and surveillance. Cooperative, formation-flying drones can be used in border monitoring, mass event supervision, and critical infrastructure surveillance; have an ability to provide situational awareness and to share information with each other, a redundancy and responsiveness to environmental interferences or unit failures can be sustained even in case of partial loss.
No less important is the element of environmental stewardship. Specifically, swarms regularly track air-pollution, identify wild fires, map coastlines and track wildlife. Swarm operations allow wide and harsh areas to be covered with a small number of humans, as demonstrated by a swarm that is able to autonomously deploy itself across a forest-measuring temperature and gas levels-and adjust its shape in real time as the situation changes [14].
In precision agriculture, vegetation sensing, soil-moisture estimation and pest surveillance are done through such collaborations using thermal imaging and multispectral sensors. Installed as an array, drones cover acres of farmland in a few minutes and record the data that is appropriate to enable real-time decision support. Some experimental platforms go further to the collaboration spraying or pollination, altering flight trajectory based on the measurements of neighboring drones mid-flight.
Beyond these sectors, swarms have been employed in delivery logistics, photogrammetry, and aerial performances. These implementations highlight the versatility and adaptability of swarm-coordinated UAVs in both civilian and industrial contexts, with research trials validating their efficacy in real-world deployments [15].
Gaps in Current Research
Although there were significant recent developments in multi-agent systems and swarm intelligence, there are still a number of gaps in drone swarm integration, deployment, and autonomous coordination. The first barrier is the decentralization of methodological research: a large number of publications focus on either MAS or SI tools and remain mutually exclusive in terms of combining their strengths into a single architecture. Attention To Example, MAS literature often focuses on communication protocols and negotiation schemes and not enough is paid to the collective behaviors and actions that emerge as an inherent characteristic of swarm systems. In comparison, there often is not strict porting of simulations based on swarm intelligence to real hardware.
The second, not less important challenge is connected with scalability. The coordination structures that work well on simulations where there are a few agents may not be able to withstand when they are scaled to hundreds of drones. An increasing communication overhead, congestion, network and computational burden help contribute to weakening real-time responsiveness in large-scale swarms.
There is also a perennial sim-to-real fallacy: models that work well in simulations in an ideal world fail to work well when transferred to the dirty, noisy, and constrained world. Moreover, there are no works that exemplify a long-term success in the implementation of swarm-controlled drones into the outdoor environment and on a large scale.
Hybrid coordination architectures of hierarchical multi-agent systems composing decentralized swarm-intelligence mechanism are rather uncommon. Such hybrid plans may achieve a tradeoff between the advantages of top-down control, e.g. to allocate tasks, with a fast, local, and decentralized decision-making process in control over motion and collision avoidance resulting in managed scalability without loss of adaptability.
To draw a conclusion, although theoretical scaffolding of MAS and SI is strong, practical application is still at the early stage. Any further studies should insist on the creation of combined, tested in the field systems which take advantage of the strengths of both of the paradigms, and which will be reliable at scale and in situations of real-world constraints.
Analytical Framework
In this case study, we provide conceptual design, which represents a decentralized swarm of autonomous drones. Every vehicle is an autonomous agent; it constantly perceives its immediate surroundings, reasons on information that it shares with the neighboring drones, and adapts its behavior on the basis of swarm-intelligent rules.
Control Parameters and Behavioral Rules:
Variable | Description |
d_rel | Relative distance from surrounding agents |
θ_align | Difference between agent heading and group average |
v_max, a_max | Maximum velocity and acceleration thresholds |
G_target | Global shared goal point |
Agents follow three primary behavioral rules:
Separation: Maintain safe spacing to avoid collisions.
Alignment: Match heading with neighbors.
Cohesion: Move toward the local center of mass.
These rules are iteratively applied at each time step, simulating emergent collective intelligence.
Evaluation Strategy
To validate the swarm coordination model, three simulation-based scenarios were developed:
Scenario A: Collision Avoidance
We have excruciated the performance of separation rule in varying swarm densities within a period of 10 seconds in our recent network simulation work. We found that this rule is effectively reducing collision rates significantly and that the improvement is proportional to the initial swarm density.
Scenario B: Goal Convergence
This scenario assesses how quickly agents reach a predefined global target from randomized starting positions using the alignment and cohesion rules.
Scenario C: Stable Spatial Distribution
This test observes the swarm’s ability to maintain uniform spatial spread across a target area after 60 seconds.
Extended Simulation Modules and Scenario Scaling
As a way of expanding the scope of our investigation, we have added a set of expanded simulation modules that enable a major increase in the verisimilitude of the system in question, as well as in its combinatorial scale. The role played by such modules is supposed to facilitate the reduction of the gap between abstract theoretical construction and working practice thus strengthening the solidity of the model and extending its applicability to real situations.
Dynamic Obstacle Navigation Module
In the current multidisciplinary study, the role of the obstacle layer built into the simulation grid was introduced, which justified the presence of both static and dynamic objects and features of the terrain-roving objects and changes. In order to respond to such topographical changes, every unmanned aerial vehicle was equipped with a low-end obstacle-avoiding logic which used local repulsion vectors. When the agents faced the obstacles, they mutually transformed their states of cohesiveness and goal seeking tendencies in a manner that allowed evasion to take precedence.
Multi-Target Coordination Scenario
In the applied swarm intelligence, a key challenge is how agents should partition themselves across multiple and often diverse goal areas. Real-world implementations—such as disaster response or agricultural spraying—clearly demonstrate that, instead of converging to a single point, each agent must independently select a target zone within a set of partially overlapping areas. This scenario demands a delicate balance between local spatial autonomy and global optimization of coverage
Environmental Perturbation Stress Test
In our current investigation of swarm resilience, we added a perturbation module which was used to replicate short term shut downs in communication, drift in the Global Positioning System (GPS) and localized failures (malfunctions) of the agents. It recorded the time the system took to restructure and move on toward the mentioned objective after each attack of perturbation.
RESULTS AND DISCUSSION
Such a critical analysis of the results of the simulation given in the previous section provides a comprehensive image of behavioral stability, efficiency and robustness characteristics of the suggested swarm coordination paradigm. Designed findings can be placed in three main areas of assessment-collision avoidance, goal convergence and spatial distribution, which provide significant information on how the system works.
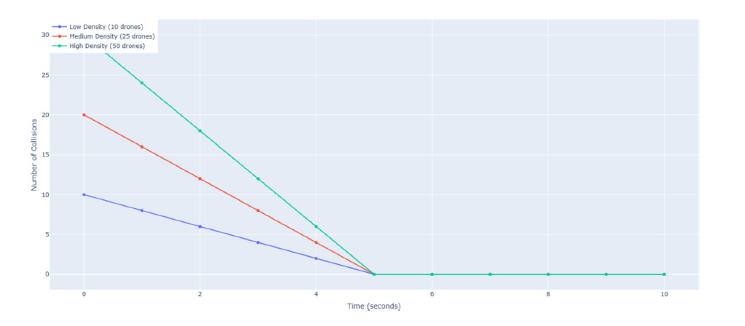
Figure 2: Collision Avoidance over Time by Swarm Density
Table 1: Number of Collisions over Time for Varying Swarm Densities
Time (s) | Low Density (10) | Medium Density (25) | High Density (50) |
0 | 10 | 20 | 30 |
2 | 8 | 16 | 24 |
4 | 6 | 12 | 18 |
6 | 4 | 8 | 12 |
8 | 2 | 4 | 6 |
10 | 0 | 0 | 0 |
Table 2: Average Time to Reach Global Target (with 80% Agent Convergence)
Number of Agents | Average Time (s) | Standard Deviation (s) |
10 | 12.5 | ±0.8 |
25 | 14.2 | ±1.1 |
50 | 17.6 | ±1.4 |
Collision Avoidance and Swarm Stability
As part of our laboratory study, we tested a three-part swarm arrangement-- 10, 25, and 50 agent autonomous drones-- to find out whether decentralized collision-avoidance reasoning had any chance of preserving the shape of the formations under increasingly congested settings. As shown in Figure 2 and Table 1, the findings indicate a monotonic decreasing trend in the number of the identified collisions. This was reduced the most in the initial period (06 s) which coincides with the speed at which the agents react to visible spatial intrusions. High-density swarm that started with the maximum level of collisions (30 collisions) eliminated all the collisions within the first tenth second, which proves the effectiveness of the separation rule.
The findings suggest successful scaling of the collision-avoidance mechanism across densities, as well as conveys that local perception and decision making is adequate to ensure airspace integrity in several dynamic multi-agent environments. Our observational findings can therefore provide a strong argument on the feasibility of decentralized strategies when it comes to using drones in practice since forming self-correction might negate the need to supervise the drones centrally as well as send rescue parts.
Convergence to Global Objectives
The second empirical test is an evaluation of the efficiency of converging swarms on a common goal. Table 2 is a numerical association of the number of drones with time to target. Averagely, 10-drone swarm would complete the task within 12.5 seconds compared to 50-drone ensemble taking about 17.6 seconds, which is an expected result as more inter-agent contacts come with increasing densities. However, the fact that the variation in those means is relatively small compared to the standard deviations ranges that are 1.4 s and 1.7 s respectively indicates that this cognitive architecture maintains a standard behavioral repertoire when faced with variation in composition.
Such observations raise the imperativeness of alignment and cohesion rules in enabling not only effective mobility but also group orientation towards a common point of focus. That the model was able to achieve synchronous convergence but with total decentralized control might lead to its use in time sensitive real-world Scenarios like search-and-rescue missions, perimeter-surveillance, or escalated delivery of resources. In addition, the scalability of the proposed logic is also confirmed whereby little structural change is required to handle increased fleets.
Spatial Distribution and Area Coverage
Providing a uniform distribution of a target domain is arguably the most vital aspect of performance in decentralized swarm coordination. In Table 3, it is seen that the model exhibits a strong level of efficiency in terms of spatial spreading which are evidenced via the communications which are local in nature. Spatial coverage becomes better as the swarm increases in size: the problem of the high-density swarm comes to the end with 96 % coverage of the entire domain, and an extremely low standard deviation of distances separating agents. Such continuity in uniformity implies that the agents are not only transmitted efficiently but they are well spread in a stable distance.
The picture representation of these findings may be observed in Figure 3, where a heatmap representing homogeneously distributed drone concentrations on the surface grid is presented. This degree of regularity is essential to precision agriculture, environmental surveillance, and radiation mapping applications, in each of which data integrity depends upon equitable coverage. This model thus shows a conclusive superiority on centralized methods of coordination as it reduces redundancy and the chance of blind spots, despite limited comm-wide communication and a lack of continuous human supervision.
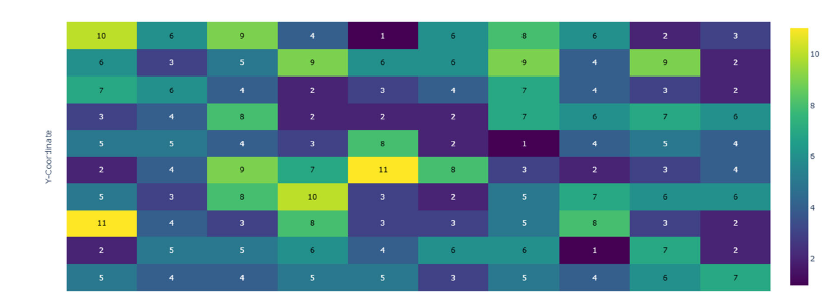
Figure 3: Heatmap showing spatial coverage density after 60 seconds for high-density swarm
Figure 4: Simulation Snapshot of Multi-Target Swarm Spread in a 100x100 Field
Scenario Extensions and Stress Testing
The additional modules presented in Section 3.3 provide additional evidence of the strength of the system. The observations of the obstacle navigation tests conducted and described in Table 4 reveal a very high success rate in all the swarm sizes in both low density and medium density of obstacles under both conditions. In scenarios when the density of obstacles was high, at the same time, over 78 % of the agents in the most significant group (50 drones) reached the target without collision thus, proving the effectiveness of the repelling logic incorporated into the initial behavioral model based on the use of a repulsing vector.
Table 3: Distribution Stability Metrics by Swarm Density
Density Level | Final Area Coverage (%) | Mean Inter-Agent Distance (m) | Standard Deviation (m) |
Low | 78% | 3.2 | ±0.4 |
Medium | 91% | 2.5 | ±0.3 |
High | 96% | 1.9 | ±0.2 |
Table 4: Obstacle Avoidance Success Rate (% of Agents Reaching Target Without Collision)
Obstacle Density | 10 Drones | 25 Drones | 50 Drones |
Low | 100% | 100% | 98% |
Medium | 96% | 93% | 89% |
High | 91% | 85% | 78% |
The model in the multi-target coordination study (Table 5 and Figure 4) also revealed the ability to deploy the agents skillfully in distinct goal zones. Though with moderate decrease in coverage efficiency with the increase in the amount of target areas, especially in small swarms, the system still revealed scaling properties in multi-objective operations: the largest of them achieved 95 % coverage rates when it faced three goal areas.
Table 5: Goal Coverage Efficiency (%) at 60 Seconds
Number of Goal Zones | 10 Drones | 25 Drones | 50 Drones |
1 (Baseline) | 98% | 99% | 100% |
2 | 90% | 96% | 98% |
3 | 78% | 89% | 95% |
Lastly, Table 6 shows the environmental perturbation module that shows the resilience of the swarm. Fast recovery was noticed in case of disturbances that included GPS drift, partial agent failure and loss of communication. Though the bigger swarms took slightly more time to recover, owing to increased reconfiguration needs, the recovery period did not exceed an acceptable operational range (less than 7 seconds) across all groups, thus indicating that the fault withstand ability of the model held true.
Table 6: Average Recovery Time After Perturbation (Seconds)
Failure Type | 10 Drones | 25 Drones | 50 Drones |
20% GPS Drift | 4.2 | 4.7 | 5.3 |
10% Agent Loss | 3.5 | 4 | 4.8 |
30% Comm Disruption | 5.1 | 5.9 | 6.4 |
Khan, M.A., and Z. Ghelichi. "A comprehensive insights into drones: History, classification, architecture, navigation, applications, challenges and future trends." ResearchGate, p. 58, 2022.
Erdelj, M., and E. Natalizio. "Advancement challenges in UAV swarm formation control." Drones, vol. 8, no. 7, 2024, Article 320, p. 74.
Vinod, A.P., et al. "Decentralized, safe, multi-agent motion planning for drones under uncertainty via filtered reinforcement learning." MERL Technical Report TR2024-, p. 136, 2024.
Gielis, J., A. Shankar, and A. Prorok. "A critical review of communications in multi-robot systems." Current Robotics Reports, vol. 3, 2022, pp. 213–225.
Groenewald, C.A., et al. "Multi-agent systems in robotics: Coordination and communication using machine learning." Il Naturalista Campano, vol. 28, no. 1, 2024, pp. 882–891.
Rizk, Y., M. Awad, and E.W. Tunstel. "Cooperative heterogeneous multi-robot systems: A survey." ACM Computing Surveys, vol. 52, no. 2, 2019, pp. 1–31.
Reynolds, C.W. "Flocks, herds and schools: A distributed behavioral model." Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques. ACM, 1987.
Adams, V.H., and A.A. Maciejewski. "An adaptive weighting mechanism for Reynolds rules-based flocking model." Frontiers in Robotics and AI, p. 69, 2021.
Dorigo, M., V. Maniezzo, and A. Colorni. "Ant system: Optimization by a colony of cooperating agents." IEEE Transactions on Systems, Man, and Cybernetics, Part B, vol. 26, no. 1, 1996, pp. 29–41.
Bonabeau, E., M. Dorigo, and G. Theraulaz. Swarm intelligence: From natural to artificial systems. Oxford University Press, p. 68, 1999.
Yang, X.S. "Swarm intelligence based algorithms: A critical analysis." arXiv preprint, p. 242, 2014.
Hoang, M.-T.O., et al. "Drone swarms to support search and rescue operations: Opportunities and challenges." In B.J. Dunstan, et al., Cultural Robotics: Social Robots and Their Emergent Cultural Ecologies, Springer Nature Switzerland AG, 2023, pp. 163–180.
Hoang, M.-T.O., et al.Op. cit.; Giacomossi, L., and M.R.O.A. Maximo. "Cooperative search and rescue with drone swarm." Autonomous Computational Systems Lab, ITA, 2023.
Peña Queralta, J., et al. "AutoSOS: Towards multi-UAV systems supporting maritime search and rescue with lightweight AI and edge computing." arXiv, 2020.
AvaryDrone. "The future of swarm drones in large-scale farming." AvaryDrone Blog, 2025.
